
ติดเครื่องวัดความเร่งกับ DUT
ใช้ขี้ผึ้งเพื่อติดเครื่องวัดความเร่งในตำแหน่งที่ระบุไว้ใน แอปทดสอบ
การเชื่อมต่อมาตรความเร่งควรแข็งแรงแต่ถอดออกได้ง่าย ระหว่างการวิ่ง
ตั้งค่าการวางแนวของเครื่องวัดความเร่งตามประเภทแอคทูเอเตอร์
ตัวกระตุ้นเรโซแนนซ์เชิงเส้น (LRA) แกน X: ตรวจสอบว่า -> บน เครื่องวัดความเร่งสอดคล้องกับทิศทางความยาวของ LRA โดยทั่วไปแล้ว ทิศทางนี้จะเทียบเท่ากับทิศทางที่เกิดการสั่นพ้อง
ตัวกระตุ้นเรโซแนนซ์เชิงเส้นแกน Z (LRA): ใช้การวางแนวของมาตรความเร่ง ตามที่อธิบายไว้ในวิธีการ LRA แกน X ด้านบน
ตัวกระตุ้นมวลหมุนเยื้องศูนย์ (ERM): วัดสัญญาณและทั้ง 3 แกน จากนั้นเลือกข้อมูลที่มีแอมพลิจูดสัญญาณแรงที่สุด
เปิดแอปทดสอบใน DUT และสร้างเอฟเฟกต์เป้าหมาย
ใช้เมาส์บลูทูธเพื่อคลิกปุ่มเป้าหมายในแอป วิธีนี้จะช่วยให้คุณคลิกปุ่มแอปได้โดยไม่ต้องใช้แรงภายนอก เช่น แรงกดจากนิ้ว
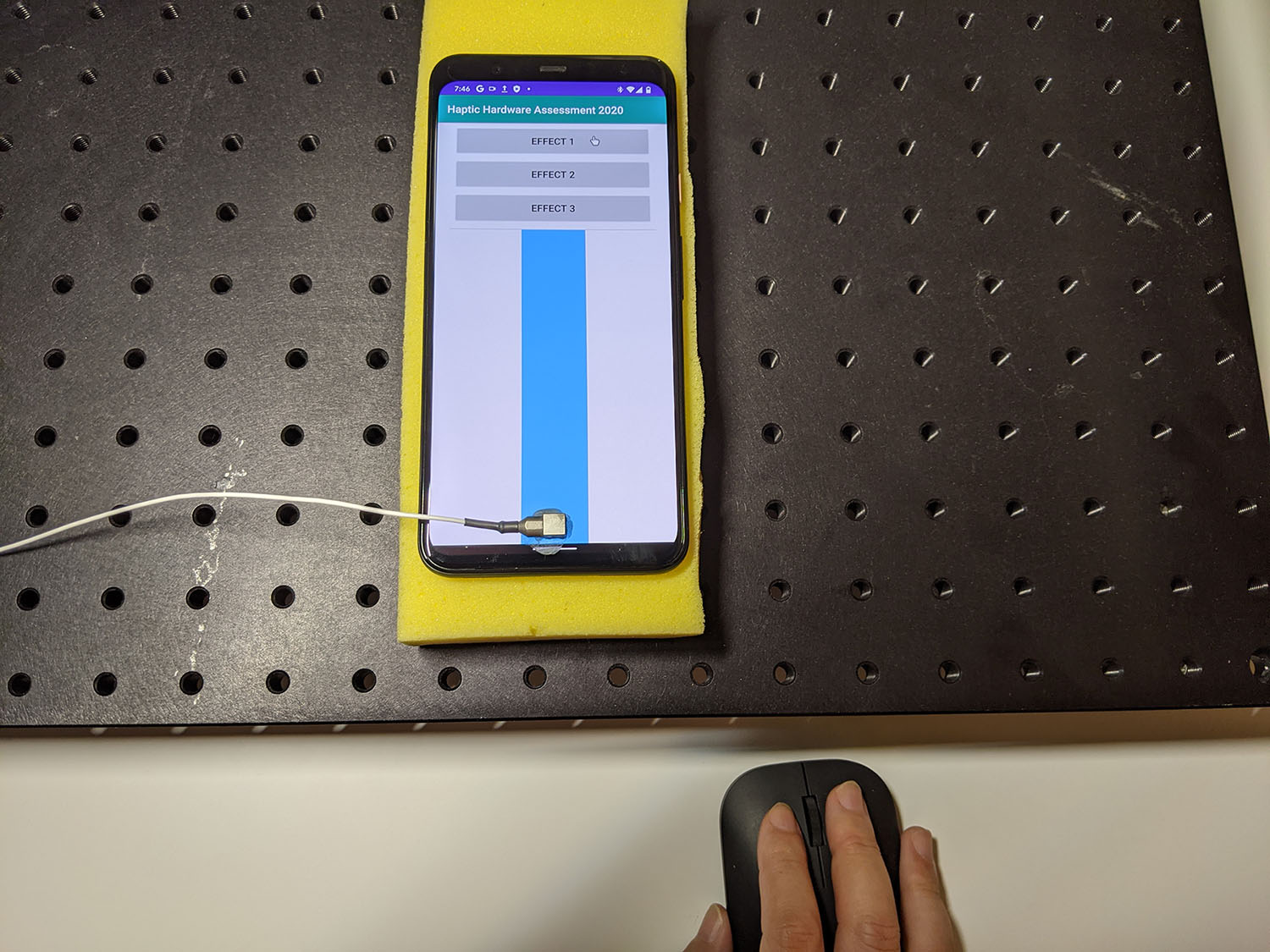
รูปที่ 1 DUT สร้างเอฟเฟกต์เป้าหมาย
บันทึกรูปคลื่นจากแอปทดสอบโดยใช้ Audacity แล้วส่งออกไฟล์โดยทำดังนี้
- คลิกบันทึกใน Audacity
- กดปุ่มเป้าหมายแต่ละปุ่มในแอปทดสอบ
ส่งออกไฟล์บันทึกเป็นไฟล์ WAV
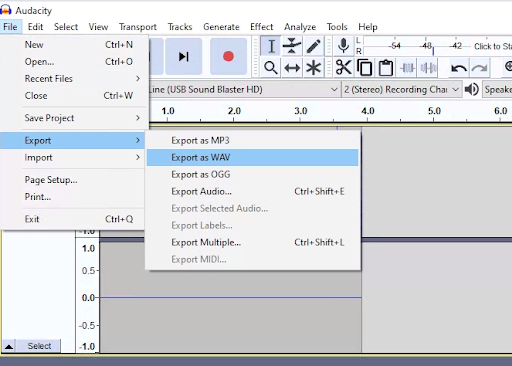
รูปที่ 2 การส่งออกจาก Audacity
วัดและบันทึกผลลัพธ์เป้าหมาย
ตัวอย่างเนื้อหาและโค้ดในหน้าเว็บนี้ขึ้นอยู่กับใบอนุญาตที่อธิบายไว้ในใบอนุญาตการใช้เนื้อหา Java และ OpenJDK เป็นเครื่องหมายการค้าหรือเครื่องหมายการค้าจดทะเบียนของ Oracle และ/หรือบริษัทในเครือ
อัปเดตล่าสุด 2025-12-03 UTC
[null,null,["อัปเดตล่าสุด 2025-12-03 UTC"],[],[]]